样品微观形貌观测-原子力显微镜应用
一、引言:
自从1982年G. Binning 和H. Rohrer发明了扫描隧道显微镜(Scanning Tunneling Microscope)后,衍生出了一系列扫描探针显微镜(Scanning Probe Microscope)。它们都是利用探针方式来取得样品表面的信息,再以影像的方式将样本的表面特性呈现出来。扫描隧道显微镜(STM) 使人们首次能够真正实时地观察到单个原子在物体表面的排列方式和与表面电子行为有关的物理、化学性质。STM要求样品表面能够导电,从而使得STM只能直接观察导体和半导体的表面结构。1986年,为了能够使非导体也可采用扫描探针显微镜(SPM)进行观测,IBM 公司的G.Binnig与斯坦佛大学的C.F.Quate 及苏黎士实验室的C.Gerber合作,共同研制发明了原子力显微镜。AFM是通过探针与被测样品之间微弱的相互作用力(原子力) 来获得物质表面形貌的信息。因此,AFM除导电样品外,还能够观测非导电样品的表面结构,且不需要用导电薄膜覆盖,其应用领域将更为广阔。除物理,化学生物等领域外,AFM在为微电子,微机械学,新型材料,医学等领域有着广泛的应用。
二、实验目的:
1、了解原子力显微镜的结构及其工作原理
2、掌握用原子力显微镜进行样品表面形貌的观测方法
三、实验仪器,试剂和材料:
原子力显微镜(日本岛津公司: WET-SPM-9500-J3型);无水乙醇;医用棉花;待测样品
四、实验原理:
(1)AFM的工作原理
在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。主要工作原理如下图:
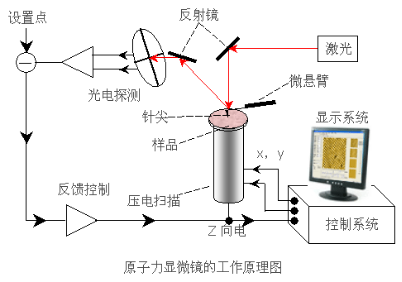
在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动,因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。
AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever 末端力的表达式为:
F = KΔZ。
ΔZ表示针尖相对于试样间的距离, K为Cantilever的弹性系数,力的变化均可以通过Cantilever 被检测。
(2)AFM关键部位:
AFM关键部份是力敏感元件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵敏度的核心。为了能够准确地反映出样品表面与针尖之间微弱的相互作用力的变化,得到更真实的样品表面形貌,提高AFM 的灵敏度,微悬臂的设计通常要求满足下述条件:
①较低的力学弹性系数,使很小的力就可以产生可观测的位移;
②较高的力学共振频率;
③高的横向刚性,针尖与样品表面的摩擦不会使它发生弯曲;
④微悬臂长度尽可能短;
⑤微悬臂带有能够通过光学、电容或隧道电流方法检测其动态位移的镜子或电极;
⑥针尖尽可能尖锐。
(3) AFM的针尖技术
探针是AFM的核心部件,如下图。目前,一般的探针式表面形貌测量仪垂直分辨率已达
 到0.1 nm,因此足以检测出物质表面的微观形貌。但是,探针针尖曲率半径的大小将直接影响到测量的水平分辨率。当样品的尺寸大小与探针针尖的曲率半径相当或更小时,会出现“扩宽效应”,即实际观测到的样品宽度偏大。这种误差来源于针尖边壁同样品的相互作用以及微悬臂受力变形。某些AFM 图像的失真在于针尖受到污染。一般的机械触针为金刚石材料,其最小曲率半径约20 nm。普通的AFM 探针材料是硅、氧化硅或氮化硅(Si3N4 ),其最小曲率半径可达10 nm。由于可能存在“扩宽效应”,针尖技术的发展在AFM中非常重要。其一是发展制得更尖锐的探针,如用电子沉积法制得的探针,其针尖曲率半径在5~10 nm 之间。其二是对探针进行修饰,从而发展起针尖修饰技术。
到0.1 nm,因此足以检测出物质表面的微观形貌。但是,探针针尖曲率半径的大小将直接影响到测量的水平分辨率。当样品的尺寸大小与探针针尖的曲率半径相当或更小时,会出现“扩宽效应”,即实际观测到的样品宽度偏大。这种误差来源于针尖边壁同样品的相互作用以及微悬臂受力变形。某些AFM 图像的失真在于针尖受到污染。一般的机械触针为金刚石材料,其最小曲率半径约20 nm。普通的AFM 探针材料是硅、氧化硅或氮化硅(Si3N4 ),其最小曲率半径可达10 nm。由于可能存在“扩宽效应”,针尖技术的发展在AFM中非常重要。其一是发展制得更尖锐的探针,如用电子沉积法制得的探针,其针尖曲率半径在5~10 nm 之间。其二是对探针进行修饰,从而发展起针尖修饰技术。
探针针尖的几何物理特性制约着针尖的敏感性及样品图像的空间分辨率。因此针尖技术的发展有赖于对针尖进行能动的、功能化的分子水平的设计。只有设计出更尖锐、更功能化的探针, 改善AFM的力调制成像(force modulation imaging) 技术和相位成像(phase imaging)技术的成像环境,同时改进被测样品的制备方法,才能真正地提高样品表面形貌图像的质量。
 (4) AFM的工作模式
(4) AFM的工作模式
AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。
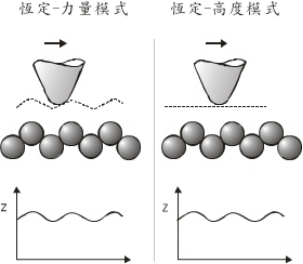
①接触模式
接触模式包括恒力模式(constant force mode) 和恒高模式(constant height mode)。在恒力模式中过反馈线圈调节微悬臂的偏转程度不变,从而保证样品与针尖之间的作用力恒定,当沿x 、y 方向扫描时,记录Z 方向上扫描器的移动情况来得到样品的表面轮廓形貌图像。这种模式由于可以通过改变样品的上下高度来调节针尖与样品表面之间的距离,这样样品的高度值较准确,适用于物质的表面分析。在恒高模式中,保持样品与针尖的相对高度不变,直接测量出微悬臂的偏转情况,即扫描器在z 方向上的移动情况来获得图像。这种模式对样品高度的变化较为敏感,可实现样品的快速扫描,适用于分子、原子的图像的观察。接触模式的特点是探针与样品表面紧密接触并在表面上滑动。针尖与样品之间的相互作用力是两者相接触原子间的排斥力,约为10-8~10-11N。接触模式通常就是靠这种排斥力来获得稳定、高分辨样品表面形貌图像。但由于针尖在样品表面上滑动及样品表面与针尖的粘附力,可能使得针尖受到损害,样品产生变形, 故对不易变形的低弹性样品存在缺点。
②非接触模式
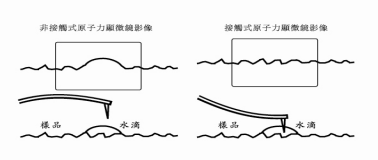 非接触模式是探针针尖始终不与样品表面接触,在样品表面上方5~20 nm 距离内扫描。 针尖与样品之间的距离是通过保持微悬臂共振频率或振幅恒定来控制的。在这种模式中,样品与针尖之间的相互作用力是吸引力———范德华力。由于吸引力小于排斥力,故灵敏度比接触模式高,但分辨率比接触式低。非接触模式不适用于在液体中成像。
非接触模式是探针针尖始终不与样品表面接触,在样品表面上方5~20 nm 距离内扫描。 针尖与样品之间的距离是通过保持微悬臂共振频率或振幅恒定来控制的。在这种模式中,样品与针尖之间的相互作用力是吸引力———范德华力。由于吸引力小于排斥力,故灵敏度比接触模式高,但分辨率比接触式低。非接触模式不适用于在液体中成像。
③轻敲模式
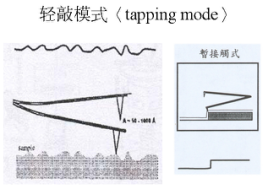 在轻敲模式中,通过调制压电陶瓷驱动器使带针尖的微悬臂以某一高频的共振频率。 0.1~1nm的振幅在Z方向上共振,而微悬臂的共振频率可通过氟化橡胶减振器来改变。同时反馈系统通过调整样品与针尖间距来控制微悬臂振幅与相位,记录样品的上下移动情况,即在Z 方向上扫描器的移动情况来获得图像。 由于微悬臂的高频振动,使得针尖与样品之间频繁接触的时间相当短,针尖与样品可以接触,也可以不接触,且有足够的振幅来克服样品与针尖之间的粘附力。因此适用于柔软、易脆和粘附性较强的样品,且不对它们产生破坏。这种模式在高分子聚合物的结构研究和生物大分子的结构研究中应用广泛。
在轻敲模式中,通过调制压电陶瓷驱动器使带针尖的微悬臂以某一高频的共振频率。 0.1~1nm的振幅在Z方向上共振,而微悬臂的共振频率可通过氟化橡胶减振器来改变。同时反馈系统通过调整样品与针尖间距来控制微悬臂振幅与相位,记录样品的上下移动情况,即在Z 方向上扫描器的移动情况来获得图像。 由于微悬臂的高频振动,使得针尖与样品之间频繁接触的时间相当短,针尖与样品可以接触,也可以不接触,且有足够的振幅来克服样品与针尖之间的粘附力。因此适用于柔软、易脆和粘附性较强的样品,且不对它们产生破坏。这种模式在高分子聚合物的结构研究和生物大分子的结构研究中应用广泛。
(5) AFM中针尖与样品之间的作用力
AFM检测的是微悬臂的偏移量,而此偏移量取决于样品与探针之间的相互作用力。其相互作用力主要是针尖最后一个原子和样品表面附近最后一个原子之间的作用力。
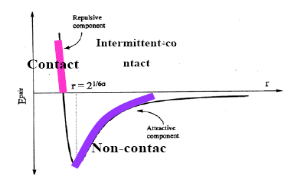 当探针与样品之间的距离d较大(大于5 nm)时,它们之间的相互作用力表现为范德华力(Van der Waals forces)。可假设针尖是球状的,样品表面是平面的,则范德华力随1Pd2变化。如果探针与样品表面相接触或它们之间的间距d小于0.3nm ,则探针与样品之间的力表现为排斥力(Pauli exclusion forces)。这种排斥力与d13 成反比变化,比范德华力随d的变化大得多。探针与样品之间的相互作用力约为10-6~10-9N,在如此小的力作用下,探针可以探测原子,而不损坏样品表面的结构细节。品与探针的作用力还有其他形式,如当样品与探针在液体介质中相接触时,往往在它们的表面有电荷,从而产生静电力;样品与针尖都有可能发生变形,这样样品与针尖之间有形变力;特定磁性材料的样品和探针可产生磁力作用;对另一些特定样品和探针,可能样品原子与探针原子之间存在相互的化学作用,而产生化学作用力。但在研究样品与探针之间的作用力的大小时,往往假设样品与探针特定的形状(如平面样品、球状探针),可对样品和探针精心设计与预处理,避免或忽略静电力、形变力、磁力、化学作力等的影响,而只考虑范德华力和排斥力。
当探针与样品之间的距离d较大(大于5 nm)时,它们之间的相互作用力表现为范德华力(Van der Waals forces)。可假设针尖是球状的,样品表面是平面的,则范德华力随1Pd2变化。如果探针与样品表面相接触或它们之间的间距d小于0.3nm ,则探针与样品之间的力表现为排斥力(Pauli exclusion forces)。这种排斥力与d13 成反比变化,比范德华力随d的变化大得多。探针与样品之间的相互作用力约为10-6~10-9N,在如此小的力作用下,探针可以探测原子,而不损坏样品表面的结构细节。品与探针的作用力还有其他形式,如当样品与探针在液体介质中相接触时,往往在它们的表面有电荷,从而产生静电力;样品与针尖都有可能发生变形,这样样品与针尖之间有形变力;特定磁性材料的样品和探针可产生磁力作用;对另一些特定样品和探针,可能样品原子与探针原子之间存在相互的化学作用,而产生化学作用力。但在研究样品与探针之间的作用力的大小时,往往假设样品与探针特定的形状(如平面样品、球状探针),可对样品和探针精心设计与预处理,避免或忽略静电力、形变力、磁力、化学作力等的影响,而只考虑范德华力和排斥力。
五、实验内容:
本实验采用接触模式中的恒力模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。
依次按下面步骤开启实验仪器:
(1) 依次开启:稳压器-控制机箱-调节光路-电脑-软件。
光路调节方法:
①勿放样品,放上空样品台,使激光打在样品台中间;
②悬臂下调,接近样品台(否则不能聚光);
③调节右侧前后两个圆形旋钮使得激光打在针尖上;
④将纸条放在反光镜下,看是否聚光(红亮光斑),若不聚光则调节右侧前后旋钮使聚光;
⑤调节左侧前后旋钮使得红色信号检测器位于中间位置,同时看反光格(至少6格,才能正常测样);
⑥微调调反光镜使得反光格增加(至少8格)。
⑦反光格达到6格以上即可,然后将样品台取出。
(2)放入样品前,先目测针尖与空样品台之间的高度,然后将其与待测样品的厚度进行比较,应使前者的高度大于后者的厚度(若前者小于后者,可在软件上点击“release”,进行抬针,抬高到适宜高度后停止。),防止针尖与样品发生碰撞导致撞针(即防止损坏探针)。
(3)仪器参数的设置:垂直(Y)反馈信号约稳定在-2附近(不单调增减即可),水平(X)反馈信号约稳定在0附近。
(4)软件参数的设置:根据扫描的样品的不同设置扫描范围(Size),速度(Rate),分辨率(Data),Z-Range,操作电压(Operating),比例增益(Proportional),积分增益(Integral),X轴,Y轴,Z轴范围。
(5)读数基本稳定后,先点击“Fast Approach”快速接近,后点击“Slow Approach”慢速接近,然后仪器开始自动扫描。
(6)扫描完毕后,点击“release”释放开始抬针,直至下方平台伸出1厘米左右,退样品。实验内容:检测出纸片,金属片(铁片,铜片,铝片三选一),云母片(或导电ITO样品)的表面形貌。
(7)实验完毕,依次关闭:软件-控制机箱-稳压器
(8)处理图像,得到二维图像,三维图像,粗糙度等,关闭电脑。
六、实验的测量结果:
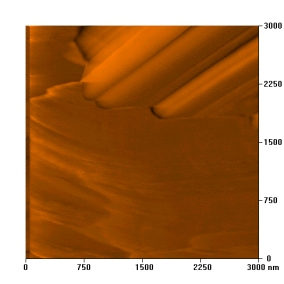
A4纸样品的表面形貌
A4纸的测量结果如下:
粗糙度 Ra: 14.8 nm ; Ry:436.4 nm ; Rz: 436.4 nm
扫描范围 X:4000 nm ; Y:4000 nm
图像大小 X: 400 pixel ; Y: 400 pixel
二维表面形貌:
三维表面形貌:
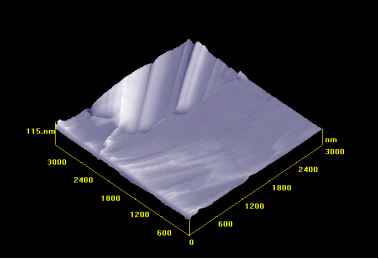
从扫描图可以看出,A4纸在右上角部位图像变化比较大,改变扫描范围,只扫描右上角部位,观察图像的变化。
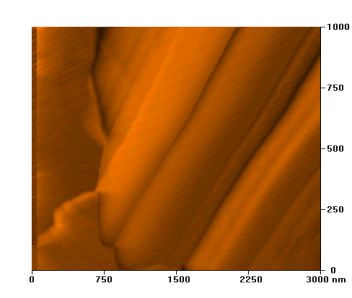
改变扫描范围扫描A4纸的结果如下:
粗糙度: Ra: 15.5 nm ; Ry:109.7 nm ; Rz: 109.7 nm、
扫描范围: X:3000 nm ; Y:1000 nm
图像大小: X: 400 pixel ; Y: 400 pixel
二维图形貌如下:
三维图形貌如下:
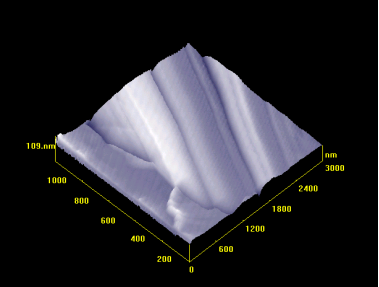
从图中及数据结果不难看出:Ra变化很小,即轮廓算术平均偏差变化小,而 Ry和 Rz变化比较大,Ry表示微观不平度,Rz表示轮廓最大高度。
由于扫描范围变小,可以看出图像相比于之前更清晰,所以在实验中若想得到比较清晰的图,可减小扫描范围
七、实验思考与讨论:
(1)AFM探测到的原子力的由哪两种主要成分组成?
一种是吸引力即范德瓦耳斯力;另外一种是电子云重叠而引起的排斥相互作用。
(2)怎样使用AFM,才能较好地保护探针?
仔细调节接触距离,粗调时,不要让指针压迫样品,保持1mm,扫描过程中保证探针不产生破坏性形变。
(3)原子力显微镜有哪些应用?
原子力显微镜可以用于研究金属和半导体的表面形貌、表面重构、表面电子态及动态过程,超导体表面结构和电子态层状材料中的电荷密度等。
另外原子力显微镜在摩擦学中的有许多应用,如纳米摩擦、纳米润滑、纳米磨损、纳米摩擦化学反应和机电纳米表面加工等。
在生物上,原子显微镜可以用来研究生物宏观分子,甚至活的生物组织。观察细胞等等。
(4)与传统的光学显微镜、电子显微镜相比,扫描探针显微镜的分辨本领主要受什么因素限制?
传统的光学显微镜和电子显微镜存在衍射极限,即只能分辨光波长或电子波长以上线度的结构。而扫描探针显微镜的分辨本领主要取决于:探针针尖的尺寸;微悬臂的弹性系数,弹性系数越低,AFM越灵敏;悬臂的长度和激光光线的长度之比;探测器PSD对光斑位置的灵敏度。对于分辨率一定的图像,扫描范围越小,获得的表面形貌越精细。
(5)要对悬臂的弯曲量进行精确测量,除了在AFM中使用光杠杆这个方法外,还有哪些方法可以达到相同数量级的测量精度?
可采用电学方法:
隧道电流法根据隧道电流对电极间距离非常敏感的原理,将SIM用的针尖置于微悬臂的背面作为探测器,通过针尖与微悬臂间产生的隧道电流的变化就可以检测由于原子间相互作用力令微悬臂产生的形变。
电容法通过测量微悬臂与一参考电极间的电容变化来检测微悬臂产生的形变。